







北海道大学
富山大学
ソライロラッパムシの「すみっこ」好きを発見
~目の無い単細胞生物の空間把握メカニズム~
ポイント
- 遊泳性の単細胞生物ソライロラッパムシがすみっこに好んでくっつくことを発見。
- 体の形の切り替えによって周囲のすみっこ空間を見つけていることが明らかに。
- 環境中のミクロな構造物の形状が生態系に与える影響を示唆。
概要
北海道大学電子科学研究所の越後谷駿特任助教、大村拓也助教、中垣俊之教授、西上幸範准教授の研究グループは、富山大学の佐藤勝彦特命教授とともに、水環境中に棲息する単細胞生物ソライロラッパムシが周囲のミクロな形の違いに応じて固着場所を選択し、「すみっこ」空間に好んで固着することを発見しました。
研究グループは自然界の形状の複雑さを模した観察容器「ジオラマ環境」*1を製作することで、体長1 mm程の繊毛虫ソライロラッパムシの特徴的な固着行動とその空間把握方法に迫りました。その結果、観察容器全体を探索していたソライロラッパムシが行動モードを切り替えて、固着前には体の形を非対称に縮ませ壁伝いに移動することが分かりました。この体の形をもとに行動の力学シミュレーションを行ったところ体の非対称性によって壁沿いの移動を実現していることが分かりました。このように単細胞生物は我々のような目を持っていませんが、体の形のシンプルな切り替えによって視覚情報に頼らずとも壁伝いに移動し、すみっこ探索を実現していたことが素朴な観察と物理モデルによる検証から明らかになりました。
ミクロな世界で生きる多様な単細胞生物は食物ネットワークを通して、環境中のあらゆる生態系を支えています。これらの生き物の周りには構造物がありふれており、本研究はミクロな細胞外構造が単細胞生物のニッチ形成を促し、微生物の分布に影響を与えていることを示唆する重要な知見です。
なお、本研究成果は、2026年2月25日(水)公開のPNAS誌(米国科学アカデミー紀要)にオンライン掲載されました。
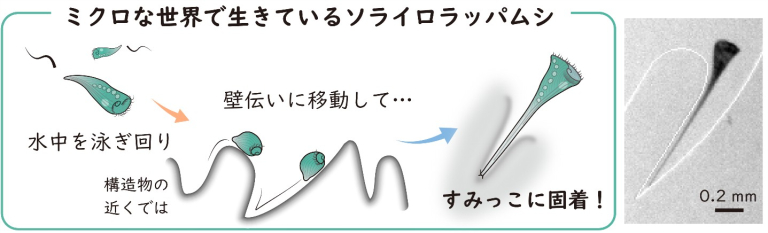
すみっこ固着を実現するプロセス(左)とすみっこに固着したソライロラッパムシの顕微鏡写真(右)
背景
環境中にはたくさんの構造物がありふれています。哺乳類や昆虫は視覚情報を頼りに、環境中の構造物をランドマークとして空間把握に利用しています。一方、視覚情報を有していない単細胞生物の空間把握方法は、ある刺激を嫌うか好むかという走性の枠組みで研究されてきました。一方で、単細胞生物が生物周囲の複雑な形状の違いに応じて空間探索を行うことは知られていませんでした。
本研究グループは体長1 mm程の単細胞生物ソライロラッパムシ(Stentor coeruleus)の行動変化に着目しました。普段は繊毛と呼ばれる運動装置で水流を起こし水中を泳ぎ回っていますが、ときに構造物に固着し、泳ぎに使っていた水流で周囲の餌をかき集めます(図1)。自然界は天敵がいたり流れがあったりと、とても複雑で過酷な環境です。どこに固着するかはソライロラッパムシが生きていく上で大切な選択です。どのような場所を固着場所として好み、どのようにその場所を見つけるのでしょうか?
研究手法
本研究グループは自然界の形状複雑さを模した環境「ジオラマ環境」を用意するために、微細加工技術を応用しミクロな構造物をデザインした観察容器を製作しました。それらの観察容器では角度や奥行きなど形の性質を変えており、ソライロラッパムシに固着場所の選択肢を与えています。固着場所を選ぶ様子を動画で撮影したのち行動解析を行いました。
また観察された行動がどのようなメカニズムで実現されているかを調べるために、行動の力学シミュレーションを行いました。単細胞生物等が生きるミクロな環境では生き物の形と推進力の分布が分かればどのような道筋をたどるのかを計算できます。目を持っていないソライロラッパムシの空間探索方法を物理的な視点からもアプローチしました。
研究成果
観察実験の結果、ソライロラッパムシは周囲の形の違いに応じて固着場所を選択していることが分かりました(図2)。45度以下の角や体の長さよりも深めの角、シャープに尖った角周辺に好んで固着していました。これらはどれもすみっこ環境です。ラッパムシは通常まっすぐ泳ぎ、壁にぶつかっては方向転換を繰り返します。しかし固着前のソライロラッパムシの動きを見たところ壁伝いに移動する行動モードに切り替えることが分かりました(図3)。すみっこ空間は環境中の構造物によって形成されるため、壁伝い行動によって高い確率ですみっこを見つけられます。
しかしラッパムシにはどこに壁があるかを識別するような感覚器官は知られていません。ではどのように壁伝い行動を実現しているのでしょうか?ラッパムシは遊泳する際、主に前側についた運動装置(繊毛束)を動かして水中を進んでいます。壁伝いに移動しているソライロラッパムシを観察したところ、体を非対称に縮め、繊毛束の構造をななめに傾けていることが分かりました。シンプルな変化ですが、運動装置の傾きをもとに行動の力学シミュレーションを実施したところ、壁伝いの移動が運動装置の傾きによって物理学的に説明できました(図4)。
すみっこであっても自身の体の幅に比べて広い空間では通り過ぎて行ってしまいます。自身の体の形状にフィットしたすみっこ環境では周囲の壁にぶつかることで移動スピードを抑え、固着場所として選んでいることが考えられます。これらの結果より、壁沿いを移動するラッパムシと周囲の壁との接触相互作用を通して、形の違いを見分けていることが示唆されました。
今後への期待
このように単細胞生物ラッパムシは視覚情報を持っていませんが、生き物自身の能動的な体の形状変化と物理環境に身を任せる壁伝いの移動を組み合わせた探索方法をとることですみっこ固着を実現していることが分かりました。単細胞生物の多くは非常に小さい生き物ですが水環境中の有機物を取り込み、より高次の生物へとつなぐ生態学的な役割を担っています。環境中にありふれたミクロな形がラッパムシの棲息場所を決めることを明らかにした本研究の結果は、環境中の幾何形状が生態系ニッチを形成し微生物の分布に影響を与えていることを示唆する重要な知見です。
謝辞
本研究は笹川科学研究助成 2021-6029、北海道大学若手研究者育成事業、科学技術イノベーション創出に向けた大学フェローシップ創設事業 JPMJFS2101、住友財団基礎科学研究助成 2300464、JSPS科研費 JP21H05303、JP21H05308、JP21H05310、JP23H04300、JP24K09388、JP24K23220、JP25K17535の助成を受けたものです。
論文情報
論文名
Geometrical preference of anchoring sites in the unicellular organism Stentor coeruleus(単細胞生物ソライロラッパムシにおける固着場所の幾何選好性)
著者名
越後谷駿1,2、大村拓也1,3、佐藤勝彦4、中垣俊之1,3、西上幸範1,3(1北海道大学電子科学研究所、2北海道大学総合イノベーション創発機構、3北海道大学大学院生命科学院、4富山大学学術研究部理学系)
雑誌名
PNAS(米国科学アカデミー紀要)
DOI
公表日
2026年2月25日(水)(オンライン公開)
お問い合わせ先
北海道大学電子科学研究所 特任助教 越後谷駿(えちごやしゅん)
TEL 011-706-9439
メール syun[at]es.hokudai.ac.jp
北海道大学電子科学研究所 准教授 西上幸範(にしがみゆきのり)
TEL 011-706-9443
メール nishigami[at]es.hokudai.ac.jp
URL https://pel.es.hokudai.ac.jp/
参考図
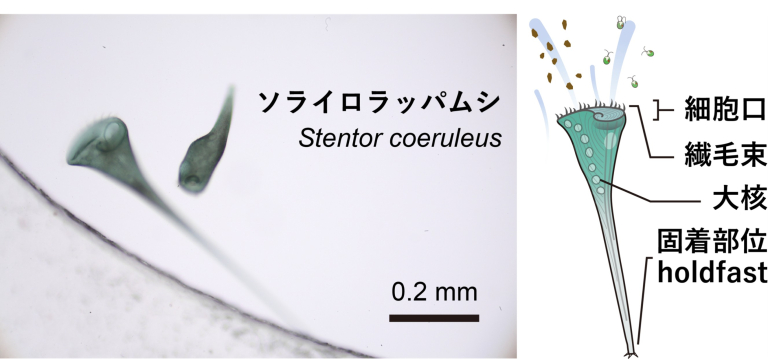
図1.ソライロラッパムシの生態:ラッパ状に体を伸ばし細く尖った先端で構造物に固着する。繊毛束で細胞口へと流れを起こし、周囲の餌をかき集めている。環境が悪くなると体の形を短い円錐状に切り変え、新たな環境を探し求めて水の中を泳ぎ回る。
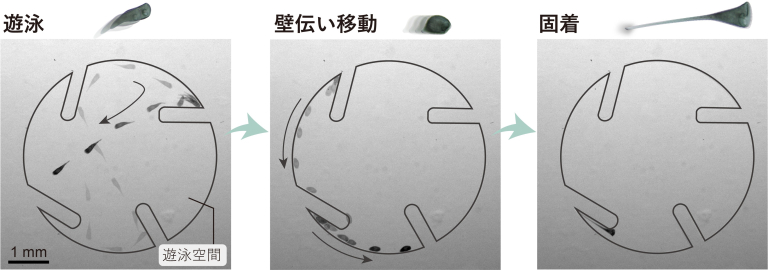
図2.すみっこ固着プロセス:複雑な形状の観察容器に入れると遊泳していたソライロラッパムシは壁伝いに移動しすみっこに固着する。上記の画像は一定間隔(遊泳時:1秒、壁伝い移動時:2秒)の写真を合成して作成した。動画は本論文中Movie S1を参照。
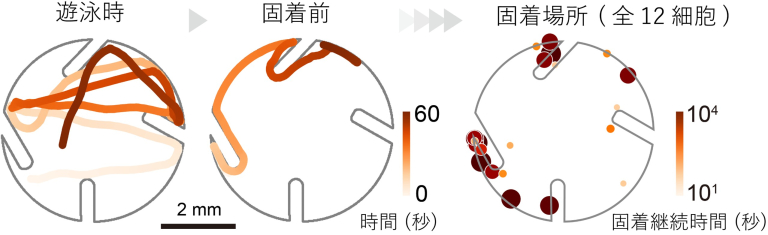
図3.通常遊泳時と固着前にソライロラッパムシが通った1分間の軌跡(左)と固着場所の分布図(右):固着前には壁伝いに移動し、最終的にすみっこに固着する習性が明らかになった。固着した場所を円で描き固着継続時間を円の色と大きさで表した。
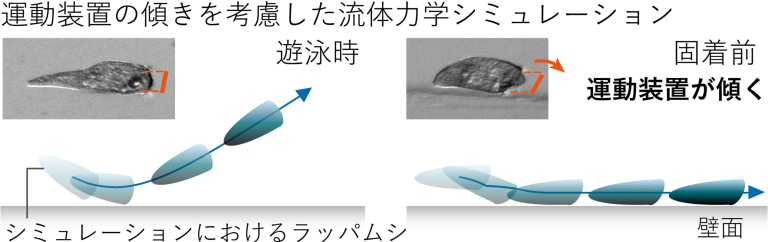
図4.遊泳時と固着時におけるソライロラッパムシの形状と行動シミュレーション:運動装置の繊毛束(オレンジの線)を傾けることで物理的に壁沿いの移動を実現できることが分かった。
用語解説
*1 ジオラマ環境
単細胞生物等の環境適応的な行動を明らかにするために構築した、自然界の複雑さをある程度取り入れた実験観察環境。JSPS科研費 学術変革領域研究(A)「ジオラマ行動力学(JP21A402)」による方法論。

