






ポイント
- オオクモヒトデがからだを風船のようにしぼませたり膨らませたりする現象を発見。
- 5本腕と6本腕の個体で,パーツ間の同期のパターンが異なることを発見。
- 水の流れを想定した数理モデルから,神経回路に頼らない協調運動の理解に貢献。
概要
北海道大学大学院生命科学院博士課程の脇田大輝氏,広島大学大学院理学院の早瀬友美乃研究員,北海道大学電子科学研究所の青沼仁志准教授の研究グループは,オオクモヒトデというヒトデに似た動物が,からだを風船のようにしぼませたり膨らませたりする協調運動「ポンピング」をし,パーツ間の同期のパターンが 5 本腕と 6 本腕の個体で異なることを発見しました。
ポンピングは「生きた動物で,明らかに異なるからだの形が,明らかに異なる動きの協調を作っている」好例です。動物の動きを協調させるネットワークとして,神経回路が注目されてきましたが,研究グループはパーツ間に神経系を想定せず,水流のはたらきでポンピングの協調運動が成り立つことを,数式を使って説明することに成功しました。
本研究は,「からだの形そのものをうまく利用して,ある動きを協調させる」という動物の知恵をピックアップした研究で,複雑なコントロールなしに協調的なリズムを生み出す設計論として,ロボット工学への貢献が期待されます。
なお,本研究成果は,2019 年 6 月 5 日(水)公開の Scientific Reports 誌に掲載されました。
【背景】
人間は,いつも息を吸って吐いて…を繰り返し,歩くときは左右の脚を交互に出し,何かを食べるときはモグモグと顎を動かします。人間に限らず,あらゆる動物はからだのパーツをうまく協調させ,さまざまなリズミックな運動を生み出します。
動きの協調に重要なネットワークとしては,動物実験や数理モデル*1 のシミュレーションから,「神経回路」が注目されてきました。一方で,ロボットを使った研究では,パーツ間に電気回路を介さずとも,「からだの形」そのものをうまく利用することで,パーツ間のある協調パターンを作り出すことが実証されています。これを動物に置きかえると,「動物は,からだの形をうまく使って,からだの離れたパーツを,神経回路に頼らずに協調させる」というデザインになっていると言えます。
しかし,実際の動物で,からだの形そのものが動きの協調にどのように影響しているかは,よくわかっていません。この理由として考えられるのは,「生きた動物で,明らかに異なるからだの形が,明らかに異なる動きの協調を作っている」という実例が見当たらないことです。
それにもってこいの実例を,オオクモヒトデという動物で報告しているのが本研究です。
【研究手法】
本研究は,オオクモヒトデ(Ophiarachna incrassata)というヒトデに似た海産無脊椎動物で, そのからだの中央の「盤」という丸い部分の一部が,時々しぼんだり膨らんだりする現象を発見したところから始まります。この運動はエサを与えた後によく起こるため,消化運動と考えられます。 研究グループは,この運動を「ポンピング」と名付けました。
オオクモヒトデは,よく見られるヒトデのように5本の腕を持ち,この時,盤も5個の扇形のパーツに分けることができます。研究グループは,ポンピングしている個体のパーツ間の動きのタイミングを観察し,数理モデルを使ってその協調パターンを説明しました。
ここで着目したのが,オオクモヒトデでみられる「四つ葉のクローバー」のような個体差です。 オオクモヒトデの多くの種では 5 本腕の個体がスタンダードですが,たまに 6 本腕の個体が生まれることがあります。数理モデルでは自由にパーツの数を変えられるので,6 本腕の個体でどのような ポンピングの協調パターンになるかを予測しました。ここに新たな観察実験を加え,「からだの形」が動きの協調に与える役割を考察しました。
【研究成果】
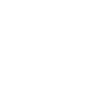
ポンピング時の5個のパーツ間の協調運動はユニークで,まるで人間が星形を5本の線で描くように規則的な順番でしぼむ(膨らむ)のを繰り返しました。つまり,円形の盤を5個の扇形のパーツに分けたとき,あるパーツがしぼむと,次のタイミングでは必ず1個飛ばした位置にあるパーツがしぼむのです。例えば,左回りに 1~5 の番号を付けると,その順番は 1→3→5→2→4→…か,逆順で 1→4→2→5→3→…を繰り返します。ここで研究グループが立てた数理モデルは,5個のパーツ間に神経のつながりを想定せず,水の流れだけを仮定したものです。すなわち,各パーツのしぼむタイミングを,パーツ内の水の量と,膜の圧力の変化で説明しました。このモデルをシミュレーションすると,上記の1個飛ばしパターンがそのまま再現されました。
さて,モデル内で他の条件を変えずに,パーツの数を6個にしたらどうでしょうか。そこには,2つの同期した正三角形が現れました。つまり,パーツの番号を左回りに1~6と付けると,1,3,5が同期したあと,2,4,6が同期するのを繰り返しました。ここまでならば,6本腕の個体でのポンピングをただ予測したにすぎませんが,実際にレアな6本腕のオオクモヒトデを入手して確かめたところ,そのポンピングはまさしく上記の同期パターンと同様でした。
このように,数理モデルのシミュレーションの動きと,実際の動物の動きとが一致したことで,神経回路に頼らない水流ネットワークのもっともらしさが評価されました。
【今後への期待】
5本腕と6本腕のポンピングの違いは,「生きた動物で,明らかに異なるからだの形が,明らかに異なる動きの協調を作っている」好例です。数理モデルでは,水流ネットワークを仮定することで ポンピングの協調パターンが生まれましたが,実際のオオクモヒトデがこの神経系に依存しない ネットワークだけを使っているのか,それともパーツ間の協調に神経回路や他の要素を介入させているのかは,今後研究すべき点です。
ポンピングという現象には,放射相称という形のわかりやすさ,数とともに同期性が変わるユニークな個体差,肉眼でみえる適度なスケール,神経系が関わるとすればそのシンプルな環状構造,というように,研究しやすい要素がそろっています。ポンピングには,「動物のからだの形が,神経系と折り合わさって,ある動きを協調させる」というワンシーンをあぶり出す恰好のステージとなることが期待されます。
神経回路に頼らずとも水の流れだけでパーツ間が協調するというシミュレーション結果は,複雑な電気回路を介さずに協調的なリズムを生み出すデザインとして,ロボット工学への応用が望まれます。オオクモヒトデはなぜポンピングするのか?という疑問に対しては,現時点では消化の効率化と予想しています。今後,機能の面も掘り進めることで,オオクモヒトデという動物の生態の理解と,応用科学の場での活躍につながることが期待されます。
論文情報
| 論文名 | Different Synchrony in Rhythmic Movement Caused by Morphological Difference between Five- and Six-armed Brittle Stars(クモヒトデの5腕と6腕の形態差がもたらす,リズミックな運動の異なる同期性) |
| 著者名 | 脇田大輝1,早瀬友美乃2,青沼仁志3(1 北海道大学大学院生命科学院,2広島大学大学院 理学院,3北海道大学電子科学研究所) |
| 雑誌名 | Scientific Reports(自然科学の総合誌) |
| DOI | 10.1038/s41598-019-44808-w |
| 公表日 | 2019年6月5日(水)(オンライン公開) |
お問い合わせ先
北海道大学電子科学研究所 准教授 青沼仁志(あおぬまひとし)
TEL 011-706-3832
FAX 011-706-3832
メール aon(at)es.hokudai.ac.jp
URL http://ncmac2.es.hokudai.ac.jp/
配信元
北海道大学総務企画部広報課(〒060-0808 札幌市北区北8条西5丁目)
TEL 011-706-2610
FAX 011-706-2092
メール kouhou(at)jimu.hokudai.ac.jp
【用語解説】
*1 数理モデル … 数式を使ってある現象を説明したもの。
