







令和元年12月3日
- 東北大学電気通信研究所
- オタワ大学
- 北海道大学
- スイス連邦工科大学ローザンヌ校
- Human Frontier Science Program
概要
東北大学電気通信研究所の石黒章夫教授,加納剛史准教授,安井浩太郎氏(博士後期課程,日本学術振興会特別研究員),スイス連邦工科大学ローザンヌ校の Auke J. Ijspeert 教授,オタワ大学の Emily M. Standen 准教授,北海道大学電子科学研究所の青沼仁志准教授の研究グループは,ムカデが陸上と水中を行き来する際の「身のこなし方」に着目することで,環境に適応して「理にかなった」運動パタ ーン注1を生み出す制御のメカニズムを解明しました。
一般に動物は,環境に応じた運動パターンを柔軟に生み出すことで,様々な環境下を自在に動き回ることができます。その中でも特に興味深いのは,陸上では複数の脚を協調させて歩き,水中では胴体をくねらせて泳ぐという振る舞いです(以下,この振る舞いを「水陸両用ロコモーション注2」と呼びます)。身体をうまく活用し質的に異なる環境に見事に適応する水陸両用ロコモーションは,ある種のトカゲや魚など,多くの動物種に見られます [参考文献 1,2]。ところが,この水陸両用ロコモーシ ョンがどのような制御のからくりで実現されているのか,これまで不明でした。
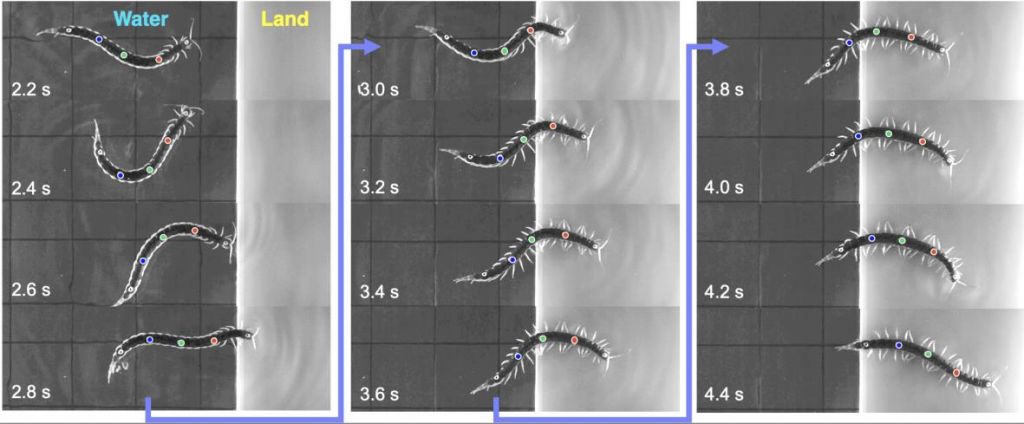
この問題解決のため,本研究ではトビズムカデの水陸両用ロコモーションに着目しました。トビズムカデは,地上では複数の脚の運動を協調させながら歩きますが,水中では脚を折りたたみ,ヘビのように胴体をくねらせながら泳ぎます(図1)。トビズムカデは,同じ構造を持つ体節が一次元状に長く連なった身体構造をしており,歩行・遊泳間の遷移の様子を観察しやすいという利点があります。また,神経を部分的に切断するなどの侵襲を伴う実験も比較的に容易に行えます。そのため,水陸両用ロコモーションのからくりを探る上で非常に適したモデル生物だと言えます。
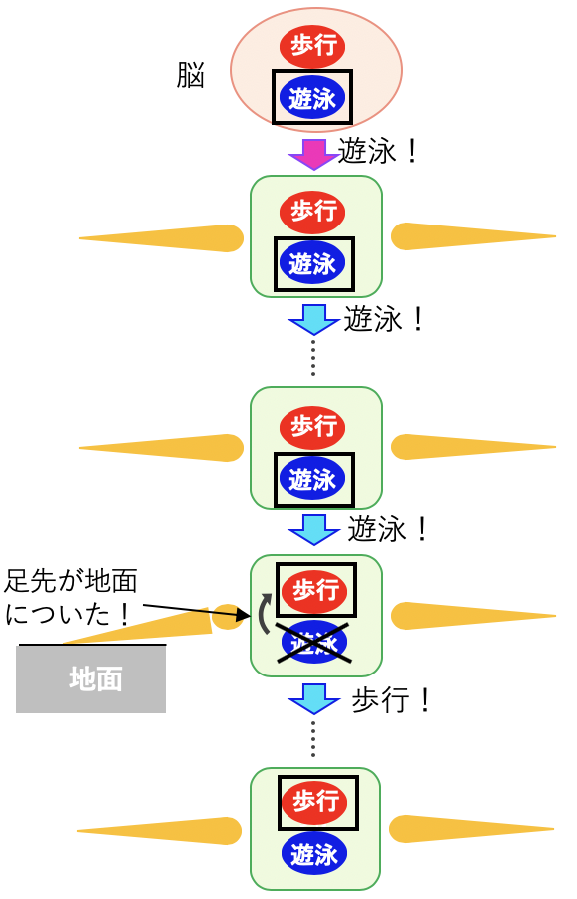
本研究ではまず,トビズムカデが陸上と水中を行き来する際に歩行・遊泳間の遷移がどのように起こるかを観察しました。また,胴体の中央付近で神経を切断した際に運動パターンがどのように変化するかも観察しました。これらの行動観察結果から,「脳からの運動指令が頭側から尾側に順に伝わるが,ある脚が地面から力を受けると,頭側から伝わってきた指令を上書きして歩行運動になる」という伝言ゲームのような制御のメカニズム(図2)が存在することが示唆されました。このメカニズムを数式で表現し,シミュレーションにより行動観察結果を再現することに成功しました。
この成果は,動物が環境に応じて柔軟に運動パターンを切り替えるメカニズムの解明につながると期待されます。また,地上でも水中でも自在に動き回れる,環境踏破能力の高いロボットの実現にもつながると期待されます。
本研究成果は,2019年12月2日(日本時間19時00分)に英国の科学誌Scientific Reports電子版に掲載されました。
<参考図> ※動画:https://youtu.be/it0L-hxDi2Q
【研究の背景】
動物は,身体の動かし方を臨機応変に切り替えることで,さまざまな環境の変化に対応しながら移動することができます。その中でも,陸上・水中という質的に異なる環境に見事に適応して動き回る「水陸両用ロコモーション」は,非常に興味深い振る舞いです。たとえば,両生類のサンショウオは,陸上では四本の脚を交互に動かしながら歩きますが,水中では脚を胴体側部に沿わせてヘビのように胴体をくねらせることで泳ぎます。この水陸両用ロコモーションは幅広い動物種で知られており,その背後にある運動制御のメカニズムを解明することは,動物の優れた運動能力に対する生物学的理解を深めるのみならず,自然環境を自在に移動できるロボットの制御方策として工学への応用も期待されます。
これまでの水陸両用ロコモーションの研究[参考文献 1]においては,歩行と遊泳の環境に応じた切り替えは脳からの運動指令の変化のみにより説明されてきましたが,動物が環境の変化をいかに知覚し運動指令の変化に反映させているのかは明らかではありませんでした。
【研究の方法】
そこで本研究では,ムカデ,その中でもトビズムカデという種に着目しました。トビズムカデは,地上では複数の脚の運動を協調させながら歩きますが,水中では脚を折りたたみ,ヘビのように胴体をくねらせながら泳ぎます(図1)。トビズムカデに着目する利点は2つあります。1つは,同じ構造を持つ体節が一次元状に長く連なった身体構造をしているため,サンショウウオなどの他の生物と比べ,歩行・遊泳間の遷移の様子を観察しやすいという点です.もう1つは,神経を部分的に切断するなどの侵襲を伴う実験も比較的に容易に行えるという点です。
トビズムカデの歩行と遊泳の切り替わりがどのように起こるのかを調べるため,陸上から水中に移動する時,また水中から陸上に移動する時の脚や胴体の動きを観察しました。さらに,トビズムカデの神経を胴体の中央付近で切断し,その際にムカデの動きがどのように変化するかを観察しました。これらの行動観察の結果をもとに,内在するメカニズムを推測し,トビズムカデの振る舞いをシンプルな数式で表現しました。そして,シミュレーションを行い,行動観察結果の再現を試みました。
【成果の内容】
行動観察の結果,単に脳からの指令だけで歩行・遊泳間の切り替えが起こっているわけではないことがわかりました。具体的には,以下のことが明らかになりました。
- (1)歩行運動は脳からの指令がなくても発現し得る。
- (2)遊泳運動は脳からの指令なしには発現し得ない。
- (3)運動パターンは頭側から尾側に順に伝搬する。
- (4)遊泳中であっても,足先が地面につくと,その部位の運動が歩行運動に変わる。
上記(1)–(4)の知見は,図2に示す伝言ゲームのようなメカニズムを考えれば,説明がつきます.身体の各部位ごとに,「歩行」か「遊泳」のどちらかを選択できるようになっているとします。脳から「歩行」か「遊泳」のどちらかの指令が下されると,その指令は頭側から尾側に順に伝わっていきます。ところが,同じ指令が最後まで伝わるかというと,そうとは限りません。「遊泳」の指令が伝わっているときに,ある脚の足先が地面につくと,その部位の指令が「歩行」に上書きされ,それ以降,「歩行」の指令が伝わっていきます。
このメカニズムを数式で表し,シミュレーションを行いました。その結果,行動観察結果を見事に再現することができました.
【研究の意義】
生物学的意義:歩行と遊泳のように,異なる運動パターンを環境に応じて切り替える動物は多く存在します。この運動パターンの切り替えは,脳からの運動指令のみならず,脳より下位の神経ネットワークや,身体の各所で取得した感覚情報の神経系へのフィードバックが重要な役割を果たしていると考えられます。しかしながら,そのメカニズムは明らかになっていませんでした。本研究で得られた知見は,ムカデのみならず,多くの動物に共通する環境に応じた運動パターンの遷移のからくりの解明につながると期待されます。
ロボット工学における意義:本研究は,地上でも水中でも自在に動き回れるロボットの実現につながると期待されます.これまでにも水陸両用ロボットは開発されてきましたが[参考文献 3],それらと比べて本研究は,身体各所で環境に応じて柔軟に運動パターンを切り替えることできるため,高い環境適応能力を実現できると期待されます。
【用語説明】
- 注1 運動パターン:「歩く」「泳ぐ」などの移動様式のこと。
- 注2 ロコモーション:動物が様々な運動パターンを用いて移動すること。
【研究助成資金等】
- Human Frontier Science Program, RGP0027/2017 (Auke J. Ijspeert, Akio Ishiguro, Emily M. Standen)
- 日本学術振興会 科学研究費補助金 基盤研究(A)16H02351(研究代表者:石黒章夫,研究分担者:青沼仁志)
- 日本学術振興会 科学研究費補助金 特別研究員奨励費 17J01042(研究代表者:安井浩太郎)
【掲載論文名】
- “Decoding the essential interplay between central and peripheral control in adaptive locomotion of amphibious centipedes”
- Kotaro Yasui, Takeshi Kano, Emily M. Standen, Hitoshi Aonuma, Auke J. Ijspeert and Akio Ishiguro
- Scientific Reports 2019年12月2日(英国時間・電子版)
【参考文献】
- [1] Ijspeert, A. J., Crespi, A., Ryczko, D. & Cabelguen, J. M. From swimming to walking with a salamander robot driven by a spinal cord model. Science 315, 1416–1420 (2007).
- [2] Standen, E. M., Du, T. Y. & Larsson, H. C. Developmental plasticity and the origin of tetrapods. Nature 513, 54–58 (2014).
- [3] Lock, R. J., Burgess, S. C. & Vaidyanathan, R. Multi-modal locomotion: from animal to application. Bioinspir. Biomim. 9, 011001 (2014).
【動画URL】
お問い合わせ先
(研究に関すること)
東北大学 電気通信研究所
教授 石黒章夫
TEL:022-217-5464
E-mail:ishiguro(at)riec.tohoku.ac.jp
(報道に関すること)
東北大学 電気通信研究所総務係
TEL:022-217-5420
FAX:022-217-5426
E-mail:somu(at)riec.tohoku.ac.jp
北北海道大学総務企画部広報課
TEL:011-706-2610
FAX:011-706-2092
E-mail:kouhou(at)jimu.hokudai.ac.jp
