






ポイント
- 4~7 本の腕をもつクモヒトデの逃避行動から,肢の数にとらわれない「歩き方」を解明。
- 前後左右のない動物が進行方向を決めるからくりを解明。
- 全方位移動ロボットへの応用に期待。
概要
北海道大学大学院生命科学院博士課程の脇田大輝氏,京都大学白眉センターの加賀谷勝史特任 助教,北海道大学電子科学研究所の青沼仁志准教授の研究グループは,クモヒトデ*1の逃避行動に 着目し,放射相称の身体をもつ動物が前後左右を決めるからくりを解き明かしました。
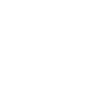
クモヒトデの一種であるOphiactis brachyaspisは星形の身体をもち,その腕の数には 4~7 本といった個体差があります。研究グループは,クモヒトデの腕の先端に触って逃避行動を誘発し,腕の数の異なる個体がそれぞれどのように腕を使って移動するのかを調べました。その結果,クモヒトデは触られた腕から左回りまたは右回りに「二つ隣」の腕の方向へ逃げる傾向があること,また,そのときに先頭になる腕の両隣の腕を同時に動かして漕ぐ傾向があることを数理モデル*2を使って明らかにしました。
本研究成果は,「なぜ肢の数が違っても大丈夫なのか?」「前後左右のない動物がどのように『前』を決めるのか?」という疑問に答えたものであり,全方位移動ロボット設計への応用が期待されます。
なお,本研究成果は,生物学と数学の融合研究として 2020年1月8日(水)公開の Journal of the Royal Society Interface 誌に掲載されました。
【背景】
ウマは 4 本の肢,アリは 6 本の肢,クモは 8 本の肢で歩きます。それぞれの動物種は,肢の数に応じた移動の仕組みを進化させてきたと考えられます。しかし,クモヒトデのなかのいくつかの種 では,個体によって肢(腕)の数が異なります。これは形の個体差の一つであり,同じ種でありながら,ある個体は 5 本,ある個体は 6 本の腕をもちます。まれに,4 本腕や 7 本腕の個体も見つかります。腕は本数にかかわらず身体の中央から放射状に伸びており,クローバーに三つ葉や四つ葉が あるのとそっくりです。
クローバーと大きく違う点は,クモヒトデは自ら腕を使って地面を這う点です。一般的な 5 本腕のクモヒトデの歩き方(ロコモーション)はこれまでにも研究され,腕を失った個体が移動するときの腕の使い方も観察されてきました。しかし,無傷でありながら 5 本以外の腕数をもつ個体の歩き方についての報告例はありませんでした。
今回の研究では,腕の数が根元から異なるときの歩き方の法則から,「肢の数にとらわれない歩き方の仕組み」と「星形の動物が進行方向(前)を決める仕組み」にアプローチしました。
【研究手法】
研究グループは,南紀白浜で採集したチビクモヒトデ科の一種(Ophiactis brachyaspis)を使って, 4~7 本腕の個体が示す逃避行動を調べました。ある腕の先端を爪楊枝で触って逃避行動を誘発し, 個体が逃げた方向を解析しました。その際に,それぞれの腕が円周方向にどのように動くのか(左 または右の漕ぎ手としてどれくらい機能するのか),また,腕同士の動きのタイミングがどのように同期するのかを角速度から算出しました。
次に「クモヒトデは刺激に対して一方向によく逃げる」という仮説と「よく逃げる方向は二つある」という仮説をそれぞれ数理モデルで表し,どちらの条件のもとで実験結果が得られたと考えるべきかを,精度の高い統計のツール(ベイズ法*3とWAIC*4)を使って判断しました。腕の動きについては,腕の長さ,腕の動く周期,逃げた距離,逃げた方向との相関をそれぞれ考えた仮説,それに加えて 個体差も踏まえた仮説,あるいはこれらを想定しない仮説を立て,同じ手法で適切さを比べました。
【研究成果】
行動実験の結果を統計解析することで,このクモヒトデは必ずしも一方向(例えば刺激の正反対)にばかり逃げるわけではなく,むしろよく逃げる方向が二つあることが示唆されました。この二つの方向は,個体がもつ腕の数が増えるにつれて,別の方向へと離れることが推定されました。具体的には,4 腕個体は刺激に対してほぼ真逆によく逃げ,5 腕個体は刺激の反対側から左または右に少し ずれた方向によく逃げ,6 腕個体ではそのずれがさらに広がり,7 腕個体は刺激に対して直角に近い方向によく逃げました。
各個体の腕の動かし方については,個体差を考えないほうが適切であり,また,個体の逃げた方向と強く相関することが示唆されました。このとき,腕の本数によらず,刺激された腕に対して左回りか右回りに「二つ隣」の腕が,進行方向に対して「前」になる傾向がありました。その「前」になった腕の両隣の腕が左右の漕ぎ手になる傾向があり,それらの動きは平泳ぎのように同期する傾向が ありました。
研究グループは,このような 4~7 本腕の個体の逃避行動から,クモヒトデが移動方向を決める 仕組みを次のように考察しました。
クモヒトデの各腕には放射神経が走っており,体の中央にある神経環(リング状の神経系)を介して他の腕の放射神経とつながっています。ある腕で忌避刺激を受け取ると,その情報をのせたシグナルが放射神経の根元へと伝わります。放射神経から神経環に入るときに経路が左右に分かれますが,シグナルはここで左回りか右回りかのどちらかの経路を優先的に辿り,その経路で別の腕へと伝わります。神経環の経路を伝うシグナルが最初に出会った腕は,刺激を受けた腕の方向へと地面を押す ような「漕ぎ手」となります。シグナルが 2 番目に出会った腕は,左右の動きに偏りが少ない中立的な腕となります。そして 3 番目に出会った腕は,1 番目の腕と平泳ぎのように同期するような,もう一つの「漕ぎ手」となります。結果的に,クモヒトデの体は刺激された腕の「二つ隣」の腕の方向へ進むことになります。
【今後への期待】
クモヒトデはヒトデやウニと同様に「放射相称」の身体をもつ動物であり,一貫した前後左右がありません。彼らがどのように進行方向である「前」を決めるのかは,前後左右がいつも決まっている人間にとってはパズルのような難題です。今回の研究は,行動実験と統計解析を組み合わせて,クモヒトデの歩き方をうまく説明するような神経系の仕組みを推測した,という段階にあります。ここでは,刺激された腕から左回りか右回りに辿ったときに各腕が何番目に隣り合うかが重要であり,腕が全体で何本あっても,個体の動きには大きな問題が生じない仕組みになっています。脊椎動物は脳を使って集中的に身体の動きを統制するシステムを採用しているのに対し,クモヒトデは「リング状に緩くつながりながら分散した神経系が,各所でうまく働いて身体を統制するシステム」を採用 していると言えます。
全体の挙動を構成要素の数で制約しないというクモヒトデの戦略を理解することで,工学分野への応用が期待できます。例えば,全方位移動ロボットの制御では,「前」を自ら決めて移動する新奇な 仕組みの提案につながります。スピードと柔軟さを兼ね備えた腕をもつクモヒトデは,ヒトデやウニと比べて格段に素早く,移動能力の面で陵駕しています。その仕組みを実装した「クモヒトデ型移動ロボット」は,起伏が激しく環境に応じた巧みな方向転換が必要とされる場所で優れたパフォーマンスを発揮すると考えられ,災害現場や宇宙環境での活躍が期待されます。
論文情報
| 論文名 | A general model of locomotion of brittle stars with a variable number of arms(腕数の 変わりうるクモヒトデのロコモーションの一般的モデル) |
| 著者名 | 脇田大輝1,加賀谷勝史2,青沼仁志3(1北海道大学大学院生命科学院,2京都大学白眉センター・瀬戸臨海実験所,3北海道大学電子科学研究所) |
| 雑誌名 | Journal of the Royal Society Interface(生物学融合分野の国際科学誌) |
| DOI | 10.1098/rsif.2019.0374 |
| 公表日 | 2020年1月8日(水)(オンライン公開) |
お問い合わせ先
北海道大学電子科学研究所 准教授 青沼仁志(あおぬまひとし)
TEL 011-706-3832
FAX 011-706-3832
メール aon(at)es.hokudai.ac.jp
URL http://ncmac2.es.hokudai.ac.jp/
配信元
北海道大学総務企画部広報課(〒060-0808 札幌市北区北8条西5丁目)
TEL 011-706-2610
FAX 011-706-2092
メール kouhou(at)jimu.hokudai.ac.jp
【用語解説】
*1 クモヒトデ … ヒトデに似た海の動物。ヒトデと大きく違う点は,盤(中央の部分)と腕の境界がわかりやすい点と,腕で地面を漕いで移動する点。
*2 数理モデル … 数式を使ってある現象を表現したもの。
*3 ベイズ法 … データがどのようなランダムさで得られたのか,分布という形で数学的に表現して推測する方法の一つ。
*4 WAIC … 推測した分布の適切さをデータによって評価する指標の一つ。渡辺澄夫博士によって考案された。
